Motor Stirling
Si buscas
hosting web,
dominios web,
correos empresariales o
crear páginas web gratis,
ingresa a
PaginaMX
Por otro lado, si buscas crear códigos qr online ingresa al Creador de Códigos QR más potente que existe
El Motor Stirling

INTRODUCCION
El motor Stirling es posterior a la máquina de vapor y fue inventado en 1816 por Robert Stirling, reverendo escocés. El objetivo era tener un motor menos peligroso que la máquina de vapor, el segundo más antiguo motor primario. Desde el principio el motor Stirling tiene una eficacia superior a la máquina de vapor, de un motor de gasolina o diesel. La energía térmica del motor Stirling se convierte en trabajo mecánico. El motor Stirling puede funcionar con fuentes de calor arbitraria. Este hecho hace posible una multiplicidad de aplicaciones para esta máquina. Una aplicación muy interesante y la cual no tiene un impacto ambiental, es la generación de electricidad con energía solar.
Otras fuentes de energía para el motor Stirling es la utilización del calor residual por ejemplo; de la industria del vidrio, el gas de la fermentación, la biomasa, la quema de madera. Es muy importante para el motor Stirling que los gases de combustión calientes, que llegan al calentador de los motores Stirling no contengan las cenizas volantes, alquitrán u otras impurezas, que pueden alterar la transición del calor.
EL MOTOR STIRLING
El motor Stirling fue inventado originalmente por Robert Stirling, en 1816. Nació como competencia a la máquina de vapor, ya que intentaba simplificarla. Perdió el interés después del desarrollo del motor de combustión interna y se ha retomado el interés estos últimos años debido al gran número de características favorables que presenta.
Se define un motor Stirling como un dispositivo que convierte trabajo en calor y viceversa, a través de un ciclo termodinámico regenerativo, con compresión y expansión cíclicas del fluido de trabajo, operando dicho fluido entre dos temperaturas la del foco caliente y la del foco frio. Es una maquina combustión externa, ósea, puede adaptarse a cualquier fuente de energía (combustión convencional o mixta, por ejemplo, con biomasa y gas, energía solar), sin que ello afecte al funcionamiento interno del motor.
Un motor de Stirling es un motor de ciclo cerrado, lo cual implica que el fluido de trabajo (un gas perfecto idealmente) está encerrado en el motor y los pistones lo desplazan en las diversas etapas del ciclo. Además, utiliza una fuente de calor externa y por tanto se pueden utilizar un gran número de fuentes: Energía nuclear, combustibles fósiles, calor de desechos, energía solar, etc. Al ser un proceso de combustión externa, el proceso de combustión se puede controlar muy bien, por lo que se reducen las emisiones.
El motor Stirling puede ser usado en muchas aplicaciones, incluyendo aquellas donde:
- Se permite velocidades relativamente bajas.
- Se encuentra disponible una fuente de enfriamiento abundante.
- Se requiere utilizar diferentes combustibles.
- Se requiere una operación con bajo ruido.
- Se permite tener una entrega de potencia de magnitud constante.
- Se permiten variaciones lentas en la potencia de salida del motor.
- Se permite un periodo relativamente largo de calentamiento.
TIPOS DE MOTORES STIRLING
MOTORES TIPO BETA
Este tipo de motor no utiliza desplazador como en la patente original de Stirling, pero desde el punto de vista termodinámico el funcionamiento es similar. Fue diseñado por Rider en Estados Unidos.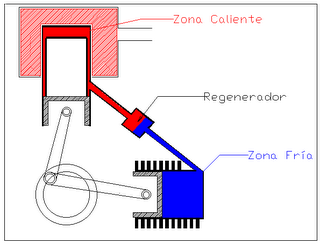
Figura 1.1 Motor Tipo Alfa
MOTORES TIPO BETA
Es el motor original de Stirling. Consta de un cilindro con una zona caliente y otra fría. En el interior del cilindro está el desplazador. Los motores pequeños no suelen llevar regenerador, y existe una holgura de algunas décimas de milímetro entre el desplazador y el cilindro para permitir el paso del gas.
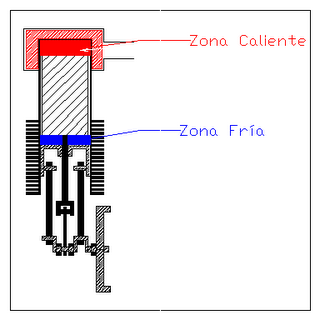
Figura 1.2 Motor tipo beta
MOTORES TIPO GAMMA
Está derivado del beta, pero más sencillo de construir. Consta de dos cilindros separados, en uno de los cuales se sitúa el desplazador y en el otro el pistón de potencia.
Consta de dos cilindros separados en uno de los cuales se sitúa el desplazador y en otro el pistón de potencia.
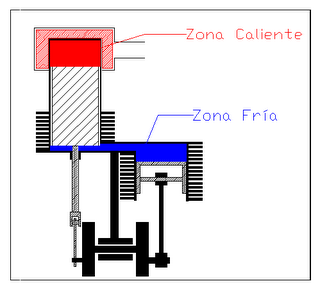
Figura 1.3 Motor tipo gamma
MOTORES TIPO RINGBOM
En 1905 Ossian Ringbom inventó un motor derivado del de tipo gamma, con una simplicidad mayor, pues el pistón desplazador no está conectado con el de potencia, sino que oscila libre movido por la diferencia de presiones y la gravedad.
Posteriormente se fueron descubriendo pequeñas modificaciones en el motor Ringbom original, que posibilitaba un motor muy simple y tan rápido como cualquiera de los motores clásicos (alfa, beta, gamma).
Posteriormente se fueron descubriendo pequeñas modificaciones en el motor Ringbom original, que posibilitaba un motor muy simple y tan rápido como cualquiera de los motores clásicos (alfa, beta, gamma).

Figura 1.4 Motor tipo Ringbom
MOTOR DE PISTÓN LÍQUIDO
En este tipo de motor se sustituye el pistón y el desplazador por un líquido.
Está formado por dos tubos rellenos de unos líquidos.

Figura 1.5 Motor de pistón liquido
MOTOR STIRLING TERMOACÚSTICO
Probablemente es la evolución última de este motor en el que se simplifica al máximo la mecánica del mismo. No existe el pistón desplazador y por lo tanto carece del sistema de acoplamiento entre los dos pistones del motor original.
Funciona gracias a ondas de presión que se generan en el cilindro de gas, de ahí el nombre de “acústico”, merced al calor suministrado en el foco caliente.
Funciona gracias a ondas de presión que se generan en el cilindro de gas, de ahí el nombre de “acústico”, merced al calor suministrado en el foco caliente.
FUNCIONAMIENTO
Un motor Stirling es una máquina térmica que se caracteriza porque permite convertir directamente la energía suministrada por una fuente de calor en energía mecánica. Esto se consigue mediante la compresión y expansión de una cantidad fija de aire que circula entre dos regiones con diferente temperatura.
El funcionamiento del motor Stirling se basa en el aprovechamiento de los cambios volumétricos del fluido de trabajo como resultado de los cambios de temperatura que éste sufre. Estos cambios volumétricos se deben al desplazamiento del fluido de trabajo entre la zona caliente y la zona fría en un cilindro cerrado
El funcionamiento del motor Stirling se basa en el aprovechamiento de los cambios volumétricos del fluido de trabajo como resultado de los cambios de temperatura que éste sufre. Estos cambios volumétricos se deben al desplazamiento del fluido de trabajo entre la zona caliente y la zona fría en un cilindro cerrado
CICLO DEL MOTOR STIRLING:
El motor Stirling en su ciclo ideal es capaz de desarrollar el trabajo máximo posible entre dos focos térmicos a distinta temperatura, conocido como rendimiento de Carnot, pero que a diferencia del ciclo de Carnot poco útil técnicamente, el motor Stirling es capaz de generar trabajo de forma práctica, pudiendo en algunos casos reales llegar al 80% del trabajo máximo obtenible, lo que lo sitúa como una opción ante estos tiempos de necesidad de mayor eficiencia energética y menor contaminación.
Desde el punto de vista termodinámico el ciclo de un motor Stirling consta de dos procesos isocóricos y de dos isotérmicos.
Desde el punto de vista termodinámico el ciclo de un motor Stirling consta de dos procesos isocóricos y de dos isotérmicos.
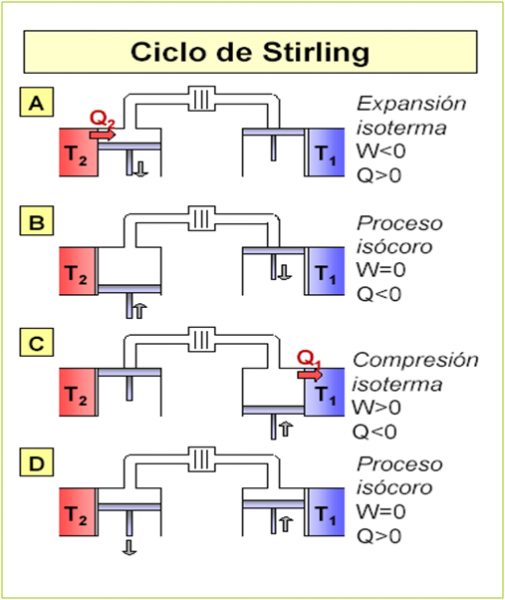
Figura 1.6 Ciclo Ideal del Motor Stirling
El ciclo del motor Stirling está compuesto por dos evoluciones a Volumen constante y dos evoluciones isotérmicas, una a Tc y la segunda a Tf. El fluido de trabajo se supone es un gas perfecto. En el ciclo teórico hay un aspecto importante que es la existencia de un regenerador. Este tiene la propiedad de poder absorber y ceder calor en las evoluciones a volumen constante del ciclo.
Si no existe regenerador, el motor también funciona, pero su rendimiento es inferior.
RENDIMIENTO
El motor Stirling es el único capaz de aproximarse (teóricamente lo alcanza) al rendimiento máximo teórico conocido como rendimiento de Carnot, por lo que, en lo que a rendimiento de motores térmicos se refiere, es la mejor opción. Conviene advertir que no serviría como motor de coche, porque aunque su rendimiento es superior, su potencia es inferior (a igualdad de peso) y el rendimiento óptimo sólo se alcanza a velocidades bajas. El ciclo teórico Stirling es inalcanzable en la práctica, y el ciclo Stirling real tendría un rendimiento intrínsecamente inferior al del ciclo Otto, además el rendimiento del ciclo es sensible a la temperatura exterior, por lo que su eficiencia es mayor en climas fríos como el invierno en los países nórdicos, mientras tendría menos interés en climas como los de los países ecuatoriales, conservando siempre la ventaja de los motores de combustión externa de las mínimas emisiones de gases contaminantes, y la posibilidad de aceptar fuentes de calor sin combustión.
Su ciclo de trabajo se conforma mediante 2 transformaciones isocóricas (calentamiento y enfriamiento a volumen constante) y dos isotermas (compresión y expansión a temperatura constante)
El rendimiento de un motor térmico es la porción de energía calorífica que es transformada en energía mecánica. Entendiendo que el calor es la energía que fluye entre dos focos a distinta temperatura podemos poner pues que:
Su ciclo de trabajo se conforma mediante 2 transformaciones isocóricas (calentamiento y enfriamiento a volumen constante) y dos isotermas (compresión y expansión a temperatura constante)
El rendimiento de un motor térmico es la porción de energía calorífica que es transformada en energía mecánica. Entendiendo que el calor es la energía que fluye entre dos focos a distinta temperatura podemos poner pues que:
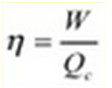
Donde:
W: Es el trabajo obtenido
Qc el calor que fluye del foco caliente al frío
VENTAJAS:
- Su elevado rendimiento, ya que el motor Stirling puede potencialmente alcanzar el rendimiento ideal de Carnot.
- Posee una baja cantidad de elementos móviles, sobre todo en comparación con los motores de combustión interna, lo que permite pérdidas de rendimiento por fricción muy bajas.
- El hecho que el ciclo en la realidad sea cerrado hace que potencialmente se puedan obtener niveles muy bajos de emisiones.
- Dado que es un motor de combustión externa el proceso de combustión se puede controlar muy bien, con lo que se reducen las emisiones.
- Como intercambia calor con el exterior, se pueden utilizar una gran cantidad de fuentes de calor, como por ejemplo energía nuclear, energía solar y combustibles fósiles, entre otras.
- El bajo nivel de ruido y la ausencia de vibraciones con que opera.
DESVENTAJAS
- Baja densidad de potencia debido a la combustión externa, lo que condiciona su tamaño.
- Dificultad en la construcción del motor para sellar el fluido de trabajo durante toda la vida útil, lo que eleva su costo.
- Falta de experiencia en la construcción de este tipo de motores en el rubro automotriz.
- Como el fluido de trabajo es gaseoso, esto acarrea dificultades operativas, con lo que los fluidos realmente viables debido a sus buenas propiedades termodinámicas son el helio y el hidrógeno.
- Lento tiempo de respuesta.
- Se requieren grandes superficies de intercambios de calor, lo que hace aumentar desmesuradamente su tamaño en comparación con los motores de combustión interna.
- Largo tiempo de encendido y apagado del motor.
CONCLUSIONES
Se logro entender el funcionamiento del motor Stirling mediante el diseño de una maqueta demostrativa, para su funcionamiento es posible usar una gran variedad de fuentes energéticas (energía solar térmica, todo tipo de combustibles).
El Motor Stirling es uno de los más simples en cuanto a su diseño. Se le puede considerar de combustión externa, pues no requiere quemar combustible en su interior y al operar no transfiere calor al entorno.
Utilizando materiales como los utilizados en el proyecto ayudaríamos al reciclaje y reduciríamos la demanda de materiales lo cual haría disminuir el consumo de combustibles fósiles utilizados para fabricarlos.
Este tipo de motores es muy adecuado para construirlos de forma casera por dos características, no precisa de muchas piezas, ni tiene que ser de alta precisión y funciona con muy moderada temperatura y presión, lo que resulta poco peligroso.
La diferencia de temperaturas es el factor fundamental en la velocidad del motor. Para ponerlo en funcionamiento se requiere de un tiempo prolongado, no funciona de manera inmediata.
Verificamos la Segunda Ley de la Termodinámica porque el motor obtuvo trabajo mecánico mediante el calor que le aportó la vela misionera para ceder parte de este calor hacia un foco frío (ambiente). La diferencia entre los dos calores tiene su equivalente en el trabajo mecánico que obtuvimos
El Motor Stirling es uno de los más simples en cuanto a su diseño. Se le puede considerar de combustión externa, pues no requiere quemar combustible en su interior y al operar no transfiere calor al entorno.
Utilizando materiales como los utilizados en el proyecto ayudaríamos al reciclaje y reduciríamos la demanda de materiales lo cual haría disminuir el consumo de combustibles fósiles utilizados para fabricarlos.
Este tipo de motores es muy adecuado para construirlos de forma casera por dos características, no precisa de muchas piezas, ni tiene que ser de alta precisión y funciona con muy moderada temperatura y presión, lo que resulta poco peligroso.
La diferencia de temperaturas es el factor fundamental en la velocidad del motor. Para ponerlo en funcionamiento se requiere de un tiempo prolongado, no funciona de manera inmediata.
Verificamos la Segunda Ley de la Termodinámica porque el motor obtuvo trabajo mecánico mediante el calor que le aportó la vela misionera para ceder parte de este calor hacia un foco frío (ambiente). La diferencia entre los dos calores tiene su equivalente en el trabajo mecánico que obtuvimos
RECOMENDACIONES
A través del trabajo realizado se indica apoyar la necesidad de complementar el estudio del área donde se produce la transferencia de calor, para adecuar mejor la salida y entrada de energía térmica.
En lo posible evitar que existan fugas de fluido ya que a medida que el motor empieza a funcionar por altas presiones el fluido del motor tiende a escapar reduciendo la potencia del motor.
http://motorstirlingyadyrtecsup.blogspot.com/
http://salesianospamplona.info/maquinas/Galeria.htm
http://laplace.us.es/wiki/index.php/Ciclo_de_Carnot
http://tecmotor.wordpress.com/page/2/
http://motorstirlingyadyrtecsup.blogspot.com/
En lo posible evitar que existan fugas de fluido ya que a medida que el motor empieza a funcionar por altas presiones el fluido del motor tiende a escapar reduciendo la potencia del motor.
ENLACES RECOMENDADOS
http://motorstirlingyadyrtecsup.blogspot.com/
http://salesianospamplona.info/maquinas/Galeria.htm
http://laplace.us.es/wiki/index.php/Ciclo_de_Carnot
http://tecmotor.wordpress.com/page/2/
http://motorstirlingyadyrtecsup.blogspot.com/
VIDEO DEMOSTRATIVO
FUNCIONAMIENTO
ELABORACION
Tu Sitio Web Gratis
© 2025 Motor Stirling![]()
![]()
![]()
![]()
![]()
Agregar un comentario